

无人机智能飞行控制系统科研、生产、测试、总装、试验、维护一体化,是伴随先进的系统建模、控制算法、余度系统管理技术、监控完整性设计、电气完整性(EI)设计、嵌入式软件架构及实现等研制技术全面进步之后的一个新阶段,是对这些技术的集大成者。作为智能飞行控制全域技术整体解决方案,它将打破当前无人机飞控设备厂研分离的状态,成为飞控设备数字化设计制造发展的趋势和潮流。联合飞机通过十年的研发技术投入,已经拥有了多项系统研制能力积累,持续开发了领先的飞控系统应用技术和飞控产品解决方案,提供业内领先的极“智”设备,打造绝对安全、易用和经济的无人飞行服务。
安全、易用、经济是助推
无人机快速发展的动力
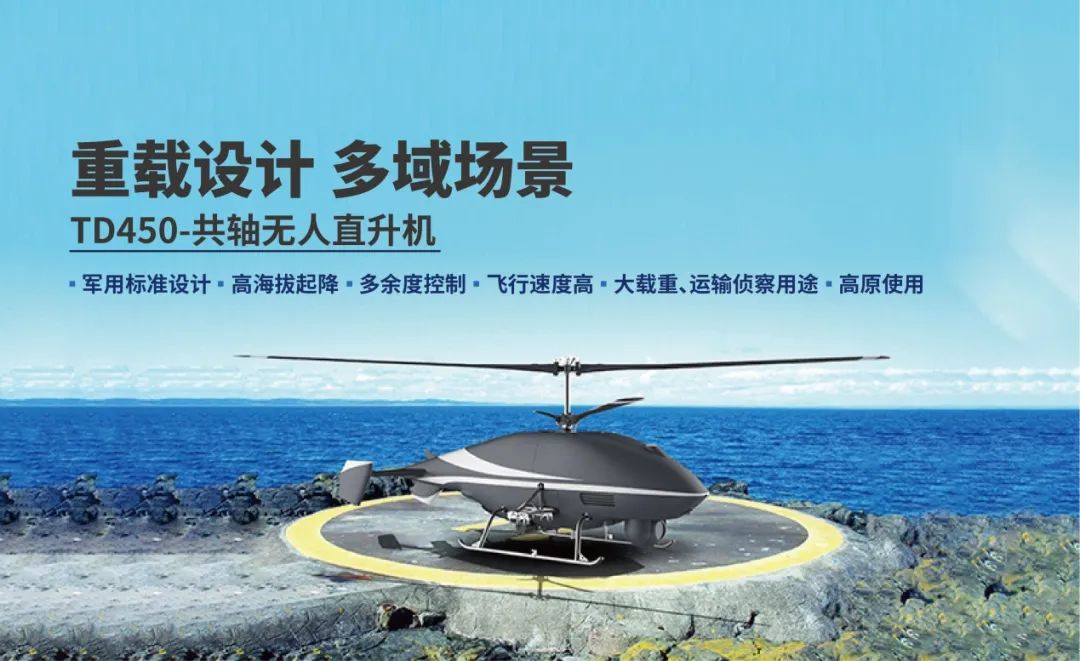
面向工业及军用领域的中大型无人机是未来无人机发展的重要方向,而一套安全、易用、低成本的机载系统是助推无人机在该方向快速发展的动力。
安全一直以来是航空器首要解决的问题,如何保证飞行安全?涉及到飞行安全的主要是飞行控制系统,普遍的做法是通过多余度系统来解决。但这只是结果,如何开展安全性分析、设计及评估,如何设计监控完整性以保证多余度系统有效工作等是安全性的核心。这也是我们的关键能力所在。
易用是解决用户友好性问题,不管是对于无人机总体单位,还是对于最终用户,良好的使用性、维护性,是产品能够大规模使用的基础。我们的目标是在尽量少的手册指导下能够支撑总体用户二次开发和最终用户的方便使用。
在满足用户指标和保证产品质量的情况下,能够尽量降低成本是一个企业综合能力的体现。在航空产品价格居高不下的形势下,我们不断研究探索,在满足安全性要求的同时大幅度降低了机载设备等产品的价格。

强化系统研制能力
按照系统工程和需求工程的理论和方法,研制大型复杂系统及分系统,要从功能架构设计到物理架构设计以保证系统或分系统最优。显性的物理架构是设计的结果,而不是设计的起点。比如,分布式还是综合式、系统余度配置等级、系统监控检测手段及系统故障安全策略等。联合飞机在这方面积累了大量的经验,包括有人军用飞机、有人民用飞机、无人直升机、无人固定翼飞机、导弹及巡飞弹等。
联合飞机按照民机适航要求的标准,包括SAE ARP4761、SAE ARP4754、RTCA DO254及RTCA DO178等,开展安全性设计与分析。按照适航符合性方法MOC0-MOC9,进行系统符合性验证。比如对于作动器这种关键产品,我们会用到以上所有符合性方法进行验证。
对于高价值系统,故障检测及处理是最后的手段。从设计上让产品处于最佳工况以提高寿命,从使用上全时检测产品状态、提取非正常特征状态、预测产品健康水平、适时维修等,都是提高产品使用寿命,最大化产品价值的手段。我们通过大量的传感器及算法,对关键产品进行健康监测及管理,极大降低了维护成本。
随着技术的进步以及飞行器使用场景的变化,我们需要不断提高无人飞行器对外界环境的感知能力,进而做出合理的应对。比如在空中对突然产生的阵风进行感知和处理,对障碍物的感知和避障,对未知场地的感知和自主起降,对对抗环境的感知和处理等。联合飞机搭建了一套适合中大型无人机的智能化套件,通过多种传感器(视觉、激光、毫米波)进行信息融合,可实现卫导拒止下的高精度定位,面向任务的路径在线规划以及异地自主起降等功能。
为了更好地实现工程应用,我们需要对物理世界进行数学抽象,进而进行定量计算、仿真和数字化控制。因此,万物皆可建模,差异是建模的准确程度。比如对于控制系统来说,核心的是需要知道被控对象的动力学模型,才能进行很好的控制。一般的建模方法有机理建模、模型辨识及数据学习等。联合飞机在无人直升机、旋翼、起落架等建模方面积累了大量的经验。
复杂系统需要先进行地面集成验证和半物理仿真验证,以尽可能减少飞行试验的风险。试验验证内容包括接口特性、控制精度、传输带宽、控制律、制导律、余度管理逻辑及故障安全策略等。经过多型产品的历练,我们在系统验证环境的搭建及系统验证试验的开展等方面积累了大量的经验。

领先技术能力
先进的系统建模工具及方法
直升机建模一直以来是学界和工业界的难题,联合飞机也一直致力于直升机的精准建模。通过Flightlab进行机理建模,通过CIFFER进行模型辨识,通过试飞数据不断修正模型,公司已经建立了一套完整的建模方法,并具备极强的工程实践属性。
先进的控制算法
控制理论追求的是对指令的精准执行和对扰动的鲁棒,控制算法从PID、LQR、H∞、自抗扰到MPC、深度学习等,通过联合飞机在无人机上的大量实践,没有一种算法能够包打天下,只能从我们的控制目标出发来选择适宜的算法,或者综合多种算法以应对不同的场景。联合飞机在该领域积累了大量经验,相信能够解决不同用户对于控制的需求。
余度系统管理技术
余度系统是提高系统安全性的重要手段,特别是在民机飞控系统上有大量使用,随着工业技术的发展、单套产品可靠性的提高,现在逐渐在减少余度配置的等级。余度系统管理的核心问题是如何保证多套相似或非相似产品的有效运行,保证系统有可接受的降级运行。联合飞机有四余度、三余度、双余度飞控系统及伺服系统的研制经验,解决了大量工程实现上的问题,产品也经过了数千小时的飞行试验验证。
监控完整性设计
多余度系统一个容易被忽视的问题是,如何保证单套系统的监控完整性。常用的监控方式有比较监控和自监控。如果监控完整性不够,故障检测率FDR过低,故障通道不能切到正常通道工作;如果监控完整性太高,故障虚警率FAR过高,系统降级太快。所以一般要求系统的故障漏检率低于系统的失效率。

电气完整性(EI)设计
电气完整性(EI)包括信号完整性(SI)、电源完整性(PI)和电磁完整性(EMI),解决信号从发送端发出,经过传输路径到达接收端后仍能保持可分辨的完整或相对完整的信号问题。如果能在电子产品的设计过程中,充分考虑这三方面的问题,就能保证电气特性,避免很多说不清的问题。
嵌入式软件架构及实现
嵌入式系统的硬件是平台,主要功能通过软件实现。从硬件层软件、操作系统到应用层软件,我们已经形成了成熟的架构,通过模块化配置,方便用户进行二次开发。通过形式化验证,保证了软件验证的完整性。经过大量型号使用,证明了软件的稳定可靠。
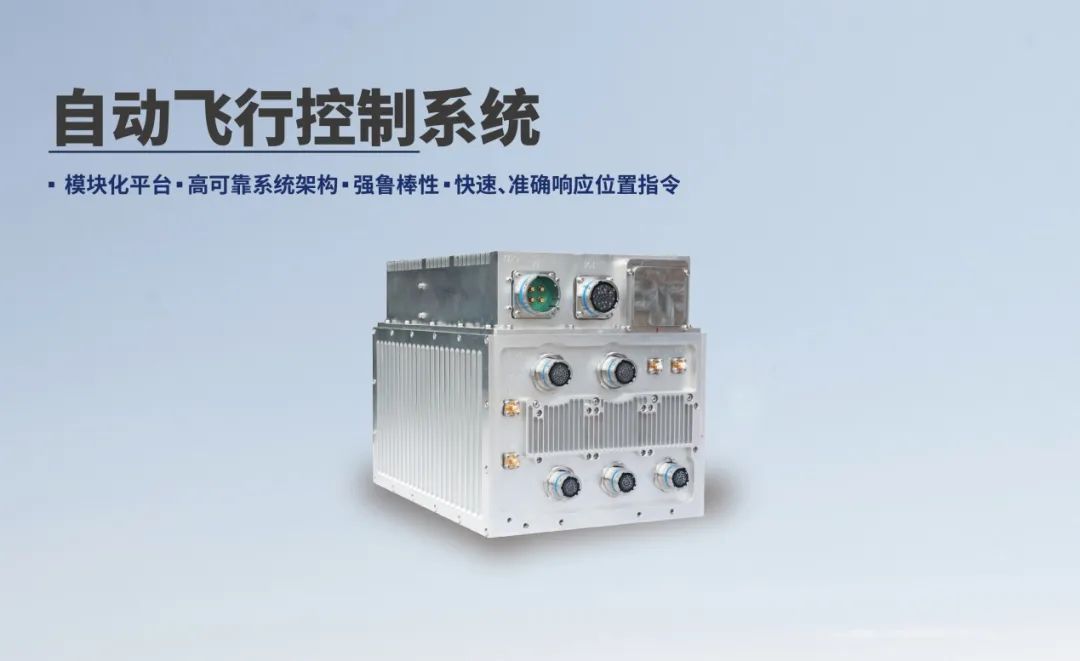
联合飞机自动飞行控制
产品解决方案
多余度飞行控制计算机
飞控计算机采用以高速LVDS串行背板总线为核心的体系结构,以资源配置的方式,实现CPU、接口及电源两余度三余度、四余度配置,采用主备工作方式,具有故障容错能力,能实现一次故障工作。核心处理器采用最新的自监控对处理器,提高了处理模块计算可信度。

高安全,高可靠,小型化,接口配置丰富
主频高达300Mhz最新自监控处理器,内置L1cache
百兆高带宽串行LVDS背板总线
支持PUBIT、IFBIT、GBIT检测,检测覆盖率高
内置超大容量数据存储装置及文件管理系统
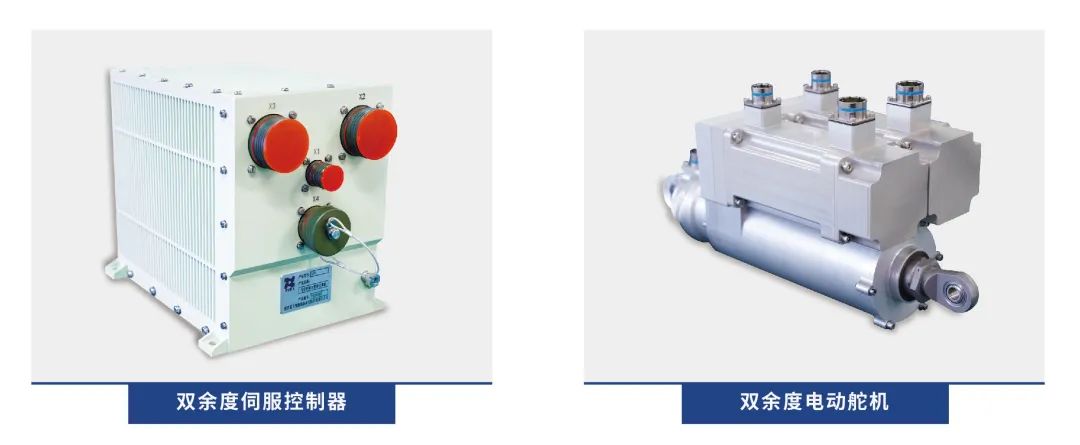
双余度伺服控制器
面向飞机舵系统及任务系统中基于直流无刷电机(BLDC)、永磁同步电机(PMSM)的机电舵机或其他电动机构的伺服控制。
采用先进的数字处理器及可编程逻辑器件的主控架构,应用先进的数字伺服技术(电流、转速及位置控制)及先进的电机控制算法(FOC),能够满足大载荷、高精度、高动态响应的伺服系统应用。
技术指标
功率范围:供电28VDC,功率≤500w
灵活的传感器应用:霍尔、编码器、旋变、LVDT/RVDT等
高精度位置控制:≤1%F.S
宽范围速度控制:50~20000rpm(受限于电机)
具有余度冗余设计,高可靠性
完善的状态监控及保护机制
双余度电动伺服舵机
直线式舵机
该舵机为全密封式直线电动舵机,电气双余度,机械单余度配置。电气双余度配置采用双绕组无刷电机、双余度LVDT直线位置传感器,机械传动采用直齿减速器加滚珠丝杠直线输出,双余度无刷电机以主/备方式工作,电机配备双余度正余弦旋转变压器,用来实现对双余度无刷电机FOC 控制。

电气双余度,输出轴直线运动
最大速度:≥55mm/s
额定输出力:60kg
行程:±30mm
位置精度:1%
频带:5Hz
旋转式舵机
该舵机为全密封式旋转电动舵机,电气双余度、机械单余度配置。电气双余度配置采用双绕组无刷电机、双余度RVDT角度位置传感器,机械传动采用直齿减速器减速,一个机械输出轴。双余度无刷电机以主/备方式工作,电机配备双余度正余弦旋转变压器,用来实现对双余度无刷电机FOC 控制。

电气双余度,输出轴旋转运动
最大转速:≥80°/s
输出力矩:18N•m
行程:±30 °
位置精度:1%
频带:5Hz
270V双余度舵机伺服系统
270V双余度舵机伺服系统由一台双余度伺服控制器及两台双余度电动舵机构成,通过载机电源提供28VDC控制用电及270V功率用电,通过RS422总线和CAN总线实现与上位机的数据通信,接收上位机发出的位置指令及舵机内部传感器反馈,控制舵机位置伺服运行。同时可向上位机反馈状态信息及舵机位置、转速及电流等数据信息。项目可应用于中大型无人机飞控作动系统,操纵舵面的伺服控制。
技术指标:
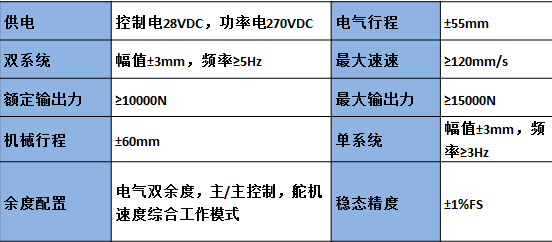
应用效益:
解决中大型无人机大功率机电作动系统应用
通过余度配置可提高系统的安全性、可靠性
通过使用全电操纵代替集中式液压作动,提高系统维护性
提高操纵系统能量转换效率
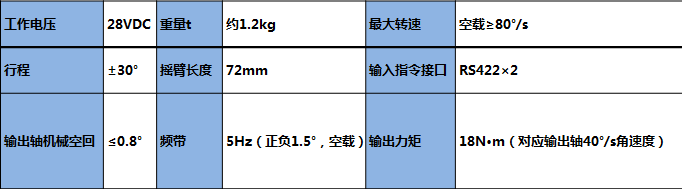
灵巧动作器
该类型产品将控制单元与作动单元集成设计,采用带比较监控的电气双余度架构,结构紧凑,便于安装维护,并具有高可靠性和高安全性的优势,适用于中小功率作动要求,如无人机、航天器及导弹方向舵等。
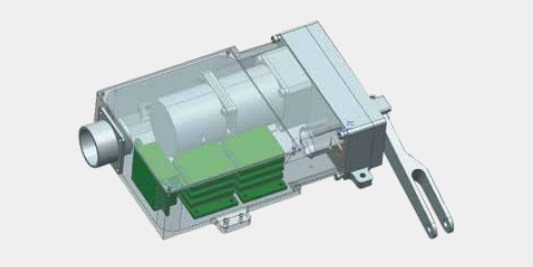
技术指标:
应用效益:
为中小型舵机应用系统降低成本
减小体积、减轻重量
提高中小型舵机应用系统的安全性及可靠性



